- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

صفحه اصلی
>
محصولات > موتور پله ای حلقه بسته > موتور پله ای حلقه بسته 2 فاز > موتور پله ای حلقه بسته نما34 سری 2 فاز 86
محصولات
- سروو موتور AC
- سرو موتور DC
- موتور پله ای حلقه بسته
- موتور پله ای هایبرد
- درایور Hybird Stepper Motor
- Closed Loop Stepper Motor Driver
- درایور سروو موتور AC
- استپر موتور یکپارچه
- درایور سروو موتور DC
- موتور پیچ
- RS485 یا CAN یا Ethercat Bus type Stepper Driver
- کاهنده سیاره ای
- کنترلر PLC
- صفحه نمایش لمسی HMI
- کیت درایور موتور سروو موتور AC Ethercat
- کیت درایور سروو موتور AC A8
- سرو موتور یکپارچه
محصولات جدید
 Lichuan AC Servo Motor Drivers Kit A8 با دقت بالا STO ABZ 1001W 1KW 4.0N.m 220V 4.6A 2500/3000RPM IP65
Lichuan AC Servo Motor Drivers Kit A8 با دقت بالا STO ABZ 1001W 1KW 4.0N.m 220V 4.6A 2500/3000RPM IP65 Lichuan AC Servo Motor Drivers Kit A8 با دقت بالا STO ABZ 1000W 1KW 3.2N.m 220V 5.8A 2500/3000RPM IP65
Lichuan AC Servo Motor Drivers Kit A8 با دقت بالا STO ABZ 1000W 1KW 3.2N.m 220V 5.8A 2500/3000RPM IP65 Lichuan AC Servo Motor Drivers Kit A8 High Accuracy STO ABZ 750W 0.75KW 2.39N.m 220V 4.5A 2500/3000RPM IP65
Lichuan AC Servo Motor Drivers Kit A8 High Accuracy STO ABZ 750W 0.75KW 2.39N.m 220V 4.5A 2500/3000RPM IP65 Lichuan AC Servo Motor Drivers Kit A8 دقت بالا STO ABZ 600W 1.91N.m 220V 3.3A 3000RPM IP65
Lichuan AC Servo Motor Drivers Kit A8 دقت بالا STO ABZ 600W 1.91N.m 220V 3.3A 3000RPM IP65- همه محصولات جدید

موتور پله ای حلقه بسته نما34 سری 2 فاز 86
LICHUAN® یک موتور پله ای حلقه بسته سری 86 Nema34 در چین تولید کننده و عرضه کننده است. ما سال ها تجربه تولید موتور پله ای حلقه بسته 2 فاز را داریم.
ارسال استعلام
توضیحات محصول
LICHUAN® به گرمی از شما برای خرید عمده موتورهای پله ای حلقه بسته سری 86 سری 2 فاز نما34 از کارخانه ما استقبال می کند. محصولات ما دارای گواهینامه CE هستند و در حال حاضر دارای مقدار زیادی موجودی کارخانه هستند. کارخانه Lichuan بیش از 14 سال تجربه تولید دارد. ما از OEM&ODM پشتیبانی می کنیم، ما خدمات خوبی را به شما ارائه می دهیم و قیمت های با تخفیف کارخانه را به شما ارائه می دهیم. ما از توزیع کنندگان بیشتری برای پیوستن به LICHUAN استقبال می کنیم. .
موتور پله ای حلقه بسته سری 86 نما34، استفاده از مواد اولیه با کیفیت بالا و فولاد سیلیکونی آهنربای دائم با استاندارد بالا، با رمزگذار 1000 خطی با دقت بالا، به طور کامل بر مشکلات پله پله موتور حلقه باز غلبه می کند، در حالی که به طور قابل توجهی بهبود می بخشد. عملکرد موتور با سرعت بالا، برای تسهیل ارتقاء برنامه درایو گام به گام سنتی، کاهش هزینه در مقایسه با موتور سروو بیش از 50٪ کاهش می یابد. طول موتور 82mm ~ 176mm، محدوده گشتاور: 3N.m ~ 12N.m، قطر شفت موتور 14mm. موتور پله ای حلقه بسته سری 86 نما34 با درایور 4 نوع: RS485 مطابقت دارد. کاناپه کردن. اترکت. درایورهای کنترل پالس
پارامترهای عملکرد الکتریکی
| مورد | مشخصات فنی |
| دقت زاویه گام | ± 5% (مرحله کامل) |
| دقت مقاومت | ± 10٪ (20 ℃) |
| دقت اندوکتانسی | ± 20٪ (1KHZ) |
| افزایش دما | حداکثر 80 ℃ (جریان دارای رتبه، روشن شدن 2 فاز) |
| دمای محیط | -20℃~*50℃ |
| مقاومت عایق | 100MQMin 500VDC |
| قدرت دی الکتریک | 500 ولت AC 1 دقیقه |
| بار شعاعی مجاز | حداکثر 0.02 میلیمتر (450gload) |
| بار رانش مجاز | حداکثر 0.08 میلیمتر (450gload) |
| حداکثر بار شعاعی | 130N (20 میلی متر از سطح فلنج) |
| حداکثر بار شفت | 30N |
| سلسله | گام زاویه (”) |
طول (میلی متر) |
برگزاری گشتاور (N.m) |
فاز جریان (A) |
فاز مقاومت (Q) |
فاز اندوکتانس (mH) |
چرخشی اینرسی (g.cm²) |
وزن (کیلوگرم) | رمزگذار وضوح (PPR) |
| LC86H260 | 1.8 | 82 | 3.0 | 6.0 | 0.3 | 1.6 | 1100 | 2.0 | 1000 |
| LC86H268 | 1.8 | 90 | 3.5 | 6.0 | 0.3 | 2.2 | 1400 | 2.2 | 1000 |
| LC86H280 | 1.8 | 105 | 4.5 | 6.0 | 0.3 | 3.4 | 1800 | 2.5 | 1000 |
| LC86H298 | 1.8 | 123 | 6.5 | 6.0 | 0.5 | 4.3 | 2800 | 3.3 | 1000 |
| LC86H2114 | 1.8 | 140 | 8.0 | 6.0 | 0.5 | 3.6 | 2800 | 4.0 | 1000 |
| LC86H2128 | 1.8 | 155 | 10 | 7.5 | 0.4 | 4.6 | 4200 | 4.5 | 1000 |
| LC86H2150 | 1.8 | 176 | 12 | 7.5 | 0.5 | 4.7 | 4300 | 5.5 | 1000 |
در بالا محصولات نماینده هستند. محصولات را می توان سفارشی کرد!
شکل و اندازه نصب (واحد: میلی متر)
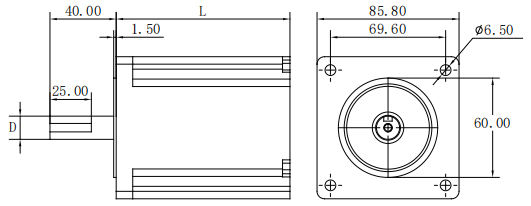
نکات: 73/60 میلی متر برای توقف موتور با ترمز (ترمز) و 60 میلی متر بدون ترمز در دسترس است. لطفا پرداخت کنید توجه به انتخاب مدل!
حالت شفت موتور
| مدل | شفت قطر (میلی متر) |
شفت پسوند (mm) |
شفت طول (میلی متر) |
| LC86H260 | f14 | کلید 5×5×15 | 40 |
| LC86H268 | f14 | Keyway5x5x15 | 40 |
| LC86H280 | f14 | کلید 5×5×15 | 40 |
| LC86H298 | f14 | کلید 5x5x15 | 40 |
| LC86H2114 | f14 | کلید 5x5x15 | 40 |
| LC86H2128 | f14 | Keyway5x5x15 | 40 |
| LC86H2150 | f14 | کلید 5x5x15 | 40 |
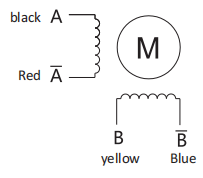
نمودار سیم کشی موتور
رنگ سیم موتور
تعاریف رمزگذار رنگ های سربی
| 1 | رنگ زرد | EB+ |
| 2 | سبز | EB- |
| 3 | سیاه | EA+ |
| 4 | آبی | EA- |
| 5 | قرمز | +5VCC |
| 6 | سفید | EGND |
یادداشت
1. فازها باید به درستی در حین اتصال متصل شوند
موتور و درایور
2. تولید گرمای آشکار موتور ممکن است در شرایط مختلف رانندگی رخ دهد. دمای سطح از
موتور مجاز است در حین کار بیش از 85 درجه سانتیگراد باشد.
3. موتور باید توسط ربات نصب بر روی جلد جلوی موتور قرار گیرد، باید به خطا توجه شود
تطبیق، و تمرکز بین شفت موتور و بار باید به شدت کنترل شود.
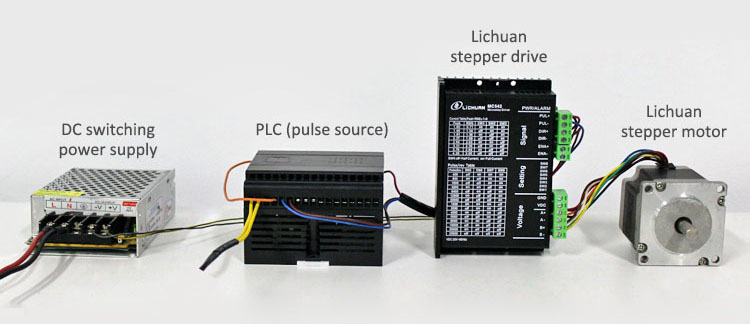
نمودار سیم کشی برنامه
یک سیستم کنترل کامل موتور پله ای باید شامل محصولی باشد که در زیر نشان داده شده است
بسته بندی محصول

ماشین محصولات تولیدی کارخانه لیچوان
-

ماشین حکاکی -

تجهیزات پوشش -

دستگاه علامت گذاری فیبر لاستر -

ماشین پیچ -

دستگاه تست -

پرینتر UV
-

دستگاه لحیم کاری اتوماتیک -

دستگاه تست گشتاور نگهدارنده -

ماشین پیچ -

دستگاه اسیلوگرافی
کاربردهای صنعتی
-

بازوی رباتیک -

دستگاه برش لیزری
-

پرینت سه بعدی -

دستگاه CNC -

Assertmbly خودکار -

دستگاه حکاکی
تگ های داغ: موتور پله ای حلقه بسته فاز نما34 سری 86، چین، تولید کنندگان، تامین کنندگان، کارخانه، سفارشی، ساخت چین، ارزان، CE، بادوام، با کیفیت
دسته بندی مرتبط
ارسال استعلام
لطفاً درخواست خود را در فرم زیر ارائه دهید. ما ظرف 24 ساعت به شما پاسخ خواهیم داد.