- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

مقاله ای برای درک تفاوت بین استپر موتور و سروو و سروو موتور
I. تفاوت بین موتورهای پله ای و سروو موتورها و سروو موتورها
استپر موتور: سیگنال پالس الکتریکی به جابجایی زاویه ای یا جابجایی خط قسمت های استپر موتور عنصر کنترل حلقه باز است. به زبان ساده، برای کنترل زاویه و تعداد چرخش ها به سیگنال پالس الکتریکی متکی است. بنابراین او برای تعیین میزان چرخش فقط به سیگنال پالس تکیه می کند. از آنجایی که هیچ سنسوری وجود ندارد، زاویه توقف ممکن است منحرف شود. با این حال، سیگنال پالس دقیق انحراف را به حداقل می رساند.
سروو موتور: برای کنترل سرعت موتور به مدار کنترل سروو تکیه کنید و موقعیت چرخش را از طریق سنسور کنترل کنید. بنابراین کنترل موقعیت بسیار دقیق است. و سرعت چرخش نیز متغیر است.
سروو (Electronic Servo): جزء اصلی سروو موتور سروو است. این شامل مدار کنترل سروو موتور + مجموعه دنده کاهش است. اوه بله، سروو موتور مجموعه دنده کاهشی ندارد. و سروو دارای مجموعه دنده کاهش است.
در مورد سروو محدود، برای تعیین زاویه فرمان بازوی سکان، به یک پتانسیومتر در زیر شفت خروجی متکی است. کنترل سیگنال سروو یک سیگنال مدوله شده با عرض پالس (PWM) است که در آن یک میکروکنترلر به راحتی می تواند این سیگنال را تولید کند.
II. اصل اولیه موتور پله ای
چگونه کار می کند:
به طور معمول روتور یک موتور یک آهنربای دائمی است و هنگامی که جریان از سیم پیچ های استاتور عبور می کند، سیم پیچ های استاتور یک میدان مغناطیسی برداری تولید می کند. این میدان مغناطیسی روتور را به سمت چرخش زاویه ای سوق می دهد، به طوری که جهت جفت میدان مغناطیسی روتور با جهت میدان مغناطیسی استاتور یکسان خواهد بود. هنگامی که میدان مغناطیسی برداری استاتور با یک زاویه می چرخد. روتور نیز با زاویه ای با این میدان مغناطیسی می چرخد. برای هر پالس الکتریکی ورودی، موتور یک گام زاویه ای به جلو می چرخد. جابجایی زاویه ای خروجی آن متناسب با تعداد پالس های ورودی و سرعت چرخش آن متناسب با فرکانس پالس ها است. با تغییر ترتیب برق دهی سیم پیچ ها، موتور معکوس می شود. بنابراین می توان تعداد و فرکانس پالس ها و ترتیب انرژی دهی سیم پیچ های هر فاز موتور را برای کنترل چرخش استپر موتور کنترل کرد.
اصل تولید گرما:
معمولاً انواع موتورها را می بینید، داخلی دارای هسته آهنی و سیم پیچ هستند. مقاومت سیم پیچ، توان تولید تلفات، اندازه تلفات و مقاومت و جریان متناسب با مربع است، که اغلب به عنوان تلفات مس شناخته می شود، اگر جریان DC یا موج سینوسی استاندارد نباشد، تلفات هارمونیک نیز تولید می کند. هسته دارای اثر جریان گردابی پسماند است، در میدان مغناطیسی متناوب نیز از دست دادن، اندازه مواد، جریان، فرکانس، ولتاژ مربوط به آن تولید میشود که از دست دادن آهن نامیده میشود. اتلاف مس و اتلاف آهن به صورت تولید گرما ظاهر می شود و در نتیجه بر راندمان موتور تأثیر می گذارد. موتور پله ای به طور کلی دقت موقعیت و گشتاور خروجی را دنبال می کند، راندمان نسبتاً کم است، جریان به طور کلی بزرگتر است، و اجزای هارمونیک بالا هستند، فرکانس جریان متناوب با سرعت و تغییر است، بنابراین موتورهای پله ای معمولاً وضعیت گرما دارند و وضعیت از موتور AC عمومی جدی تر است.
III. ساخت سکان
سروو عمدتا از یک محفظه، یک برد مدار، یک موتور محرک، یک کاهنده دنده و یک عنصر تشخیص موقعیت تشکیل شده است. اصل کار آن این است که گیرنده سیگنالی را به سروو می فرستد و آی سی روی برد مدار موتور بدون هسته را به حرکت در می آورد تا شروع به چرخش کند و نیرو از طریق چرخ دنده کاهش به بازوی چرخان منتقل می شود و در همان زمان آشکارساز موقعیت سیگنالی را به عقب می فرستد تا مشخص کند که آیا به موقعیت رسیده است یا خیر. آشکارساز موقعیت در واقع یک مقاومت متغیر است. هنگامی که سروو می چرخد، مقدار مقاومت متناسب با آن تغییر می کند و با تشخیص مقدار مقاومت می توان زاویه چرخش را شناخت. سروو موتور جنرال یک سیم مسی نازک است که به دور یک روتور سه قطبی پیچیده شده است، زمانی که جریان از سیم پیچ عبور می کند، میدان مغناطیسی ایجاد می کند و اطراف آهنربای روتور دافعه ایجاد می کند که به نوبه خود نیروی چرخش ایجاد می کند. بر اساس علم فیزیک، ممان اینرسی یک جسم با جرم آن نسبت مستقیم دارد، بنابراین هر چه جرم جسمی که باید بچرخد بیشتر باشد، نیروی مورد نیاز بیشتر است. به منظور دستیابی به سرعت چرخش سریع و مصرف انرژی کم، سروو از سیمهای مسی نازک ساخته شده است که در یک استوانه توخالی بسیار نازک پیچیده شده و یک روتور توخالی بسیار سبک و بدون قطب را تشکیل میدهد و آهنرباها در داخل سیلندر که موتور فنجان توخالی است، قرار میگیرند.
به منظور سازگاری با محیط های کاری مختلف، سرووهایی با طرح های ضد آب و ضد گرد و غبار وجود دارد. و در پاسخ به نیازهای بار مختلف، چرخ دنده های پلاستیکی و فلزی برای سرووها وجود دارد و چرخ دنده های فلزی برای سرووها عموماً دارای گشتاور و سرعت بالا هستند، با این مزیت که چرخ دنده ها به دلیل بارهای زیاد بریده نمی شوند. سرووهای درجه بالاتر به بلبرینگ مجهز خواهند شد تا چرخش سریعتر و دقیق تر انجام شود. بین یک بلبرینگ و دو بلبرینگ تفاوت وجود دارد، البته دو بلبرینگ بهتر هستند. سرووهای جدید FET عمدتاً از FET (ترانزیستور اثر میدانی) استفاده می کنند که از مزیت مقاومت داخلی پایین و در نتیجه تلفات جریان کمتری نسبت به ترانزیستورهای معمولی برخوردار است.
IV. اصل کار سروو
از موج pwm به مدار داخلی برای تولید ولتاژ بایاس، ژنراتور کنتاکتور از طریق دنده کاهش به حرکت درایو پتانسیومتر حرکت میکند، به طوری که وقتی اختلاف ولتاژ صفر است، موتور متوقف میشود تا به اثر سروو برسد.
پروتکلهای سروو PWM همگی یکسان هستند، اما آخرین سرووهایی که ظاهر میشوند ممکن است متفاوت باشند.
پروتکل به طور کلی این است: عرض سطح بالا در 0.5ms ~ 2.5ms برای کنترل سروو برای چرخش از زوایای مختلف.
V. سروو موتورها چگونه کار می کنند
شکل زیر یک مدار کنترل سروو موتور ساخته شده با تقویت کننده عملیاتی قدرت LM675 را نشان می دهد و موتور یک سروو موتور DC است. همانطور که از شکل مشخص است، تقویت کننده عملیاتی برق LM675 با ولتاژ 15 ولت تامین می شود و ولتاژ 15 ولت از طریق RP 1 به ورودی فاز تقویت کننده عملیاتی LM675 اضافه می شود و ولتاژ خروجی LM675 به ورودی سروو موتور اضافه می شود. موتور مجهز به ژنراتور سیگنال اندازه گیری سرعت برای تشخیص سریع سرعت موتور است. در واقع مولد سیگنال سرعت نوعی ژنراتور است و ولتاژ خروجی آن متناسب با سرعت دورانی است. ولتاژ خروجی از ژنراتور سیگنال اندازهگیری سرعت G به عنوان سیگنال خطای سرعت پس از مدار تقسیمکننده ولتاژ به ورودی معکوس تقویتکننده عملیاتی بازگردانده میشود. مقدار ولتاژ تنظیم شده توسط پتانسیومتر فرمان سرعت RP1 پس از تقسیم ولتاژ توسط R1.R2 به ورودی فاز تقویت کننده عملیاتی اضافه می شود که معادل ولتاژ مرجع است.
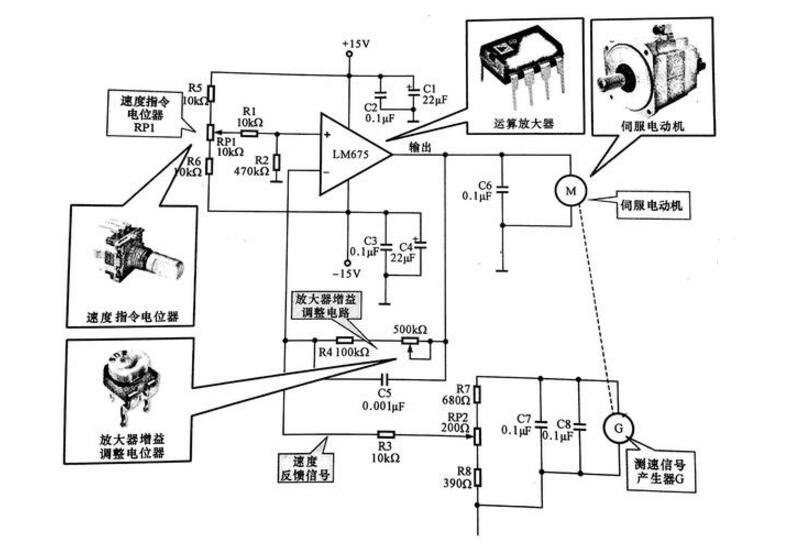
شماتیک کنترل سروو موتور
سروموتور: با حرف M برای سرو موتور نشان داده می شود، منبع تغذیه سیستم درایو است. تقویت کننده عملیاتی: با نام مدار مشخص می شود، به عنوان مثال، LM675، یک قطعه تقویت کننده در مدار کنترل سروو است که جریان درایو را برای موتور سروو فراهم می کند.
پتانسیومتر فرمان سرعت RP1: ولتاژ مرجع تقویت کننده عملیاتی را در مدار تنظیم می کند، یعنی تنظیم سرعت. پتانسیومتر تنظیم بهره تقویت کننده RP2: در مدار به ترتیب برای تنظیم دقیق بهره تقویت کننده و اندازه سیگنال بازخورد سرعت استفاده می شود.
هنگامی که بار موتور تغییر می کند، ولتاژ برگشتی به ورودی معکوس تقویت کننده عملیاتی نیز تغییر می کند، یعنی زمانی که بار موتور افزایش می یابد، سرعت کاهش می یابد و ولتاژ خروجی ژنراتور سیگنال سرعت نیز کاهش می یابد، به طوری که ولتاژ در ورودی معکوس بین این ولتاژ مرجع، ولتاژ و اختلاف ولتاژ عملیاتی و تقویت کننده کاهش می یابد. افزایش می یابد و ولتاژ خروجی تقویت کننده عملیاتی افزایش می یابد. برعکس، زمانی که بار کوچکتر می شود و سرعت موتور افزایش می یابد، ولتاژ خروجی ژنراتور سیگنال اندازه گیری سرعت افزایش می یابد، ولتاژ فیدبک اضافه شده به ورودی معکوس تقویت کننده عملیاتی افزایش می یابد، اختلاف بین این ولتاژ و ولتاژ مرجع کاهش می یابد، ولتاژ خروجی کاهش می یابد، سرعت موتور به گونه ای کاهش می یابد. سرعت چرخش را می توان در مقدار تنظیم شده به طور خودکار تثبیت کرد.